Hoverfly Technologies, Inc. |
This is a compilation of all of the significant products and projects I worked on during my time at Hoverfly Technologies. |
Obsidian v1 (2012)
|
A super-sized 3-axis camera gimbal designed for large movie cameras such as the Red Epic. At the time, there was nothing like this on the market. This gimbal used three high performance Maxon brushless gearmotors to stabilize pitch, roll, and yaw axes.
Design: Autodesk Inventor Construction: 3mm carbon, CNC machined aluminum, off the shelf hardware |
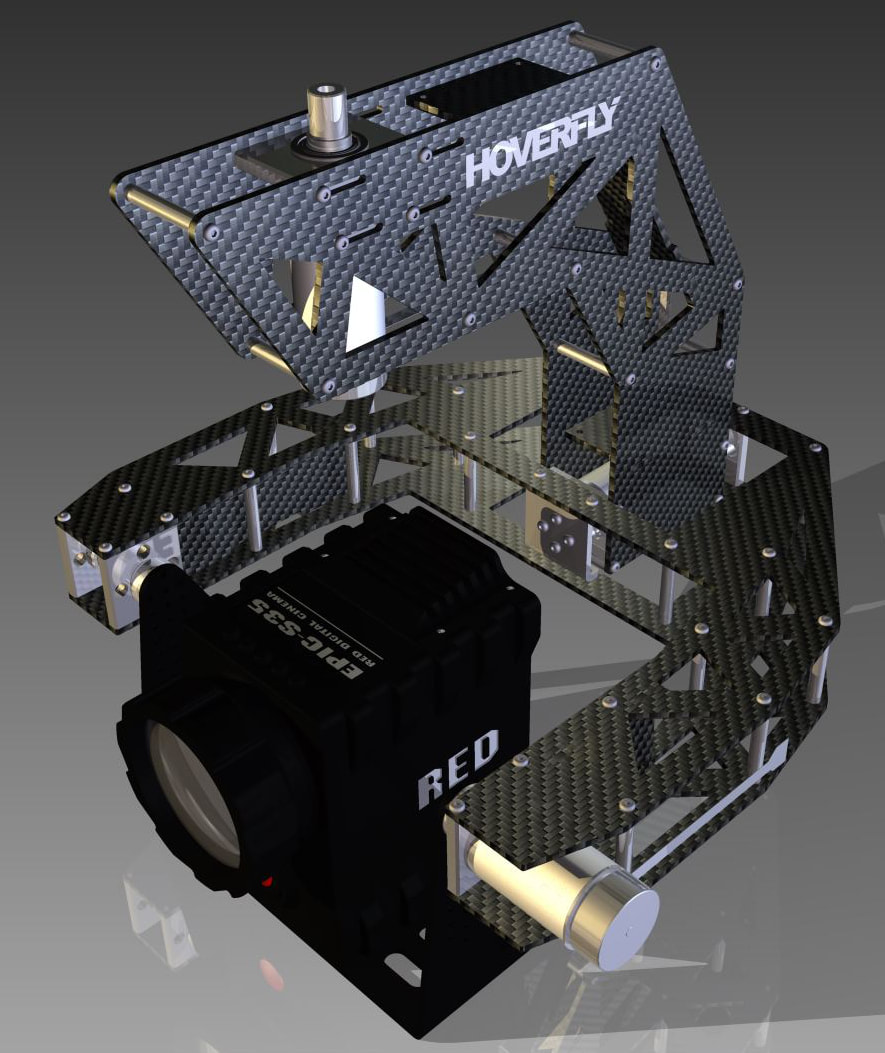
CAD Model
|
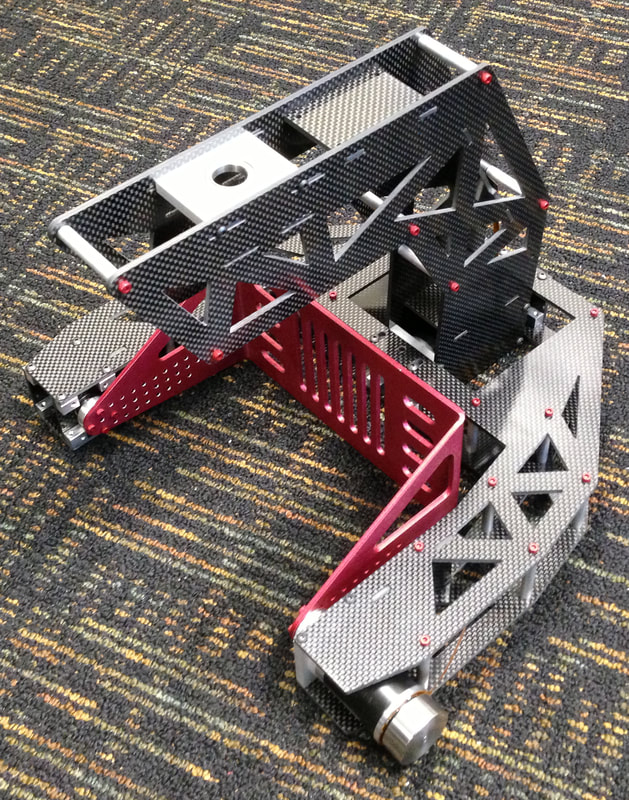
Gimbal IRL
|
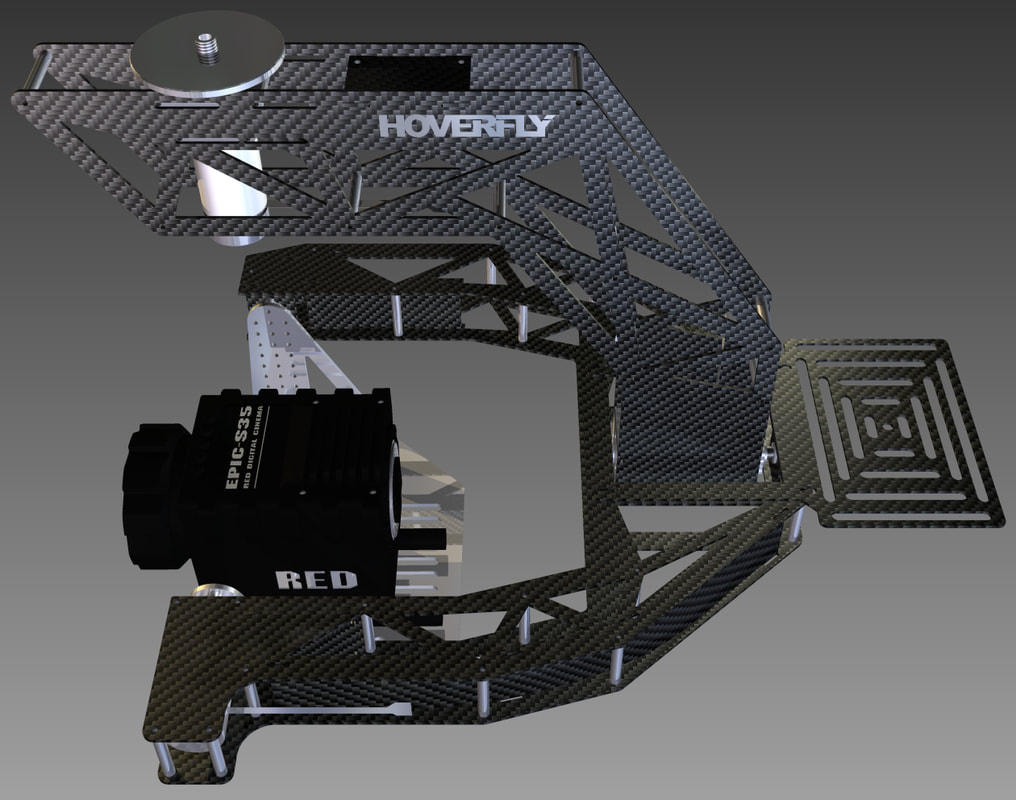
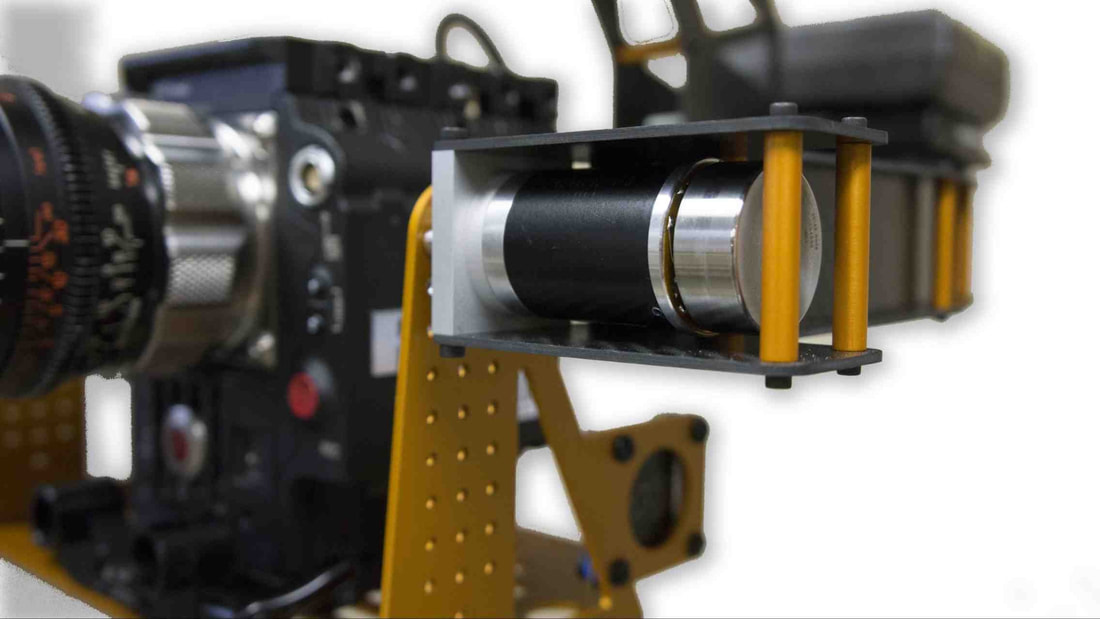
Obsidian v2 (2013)
|
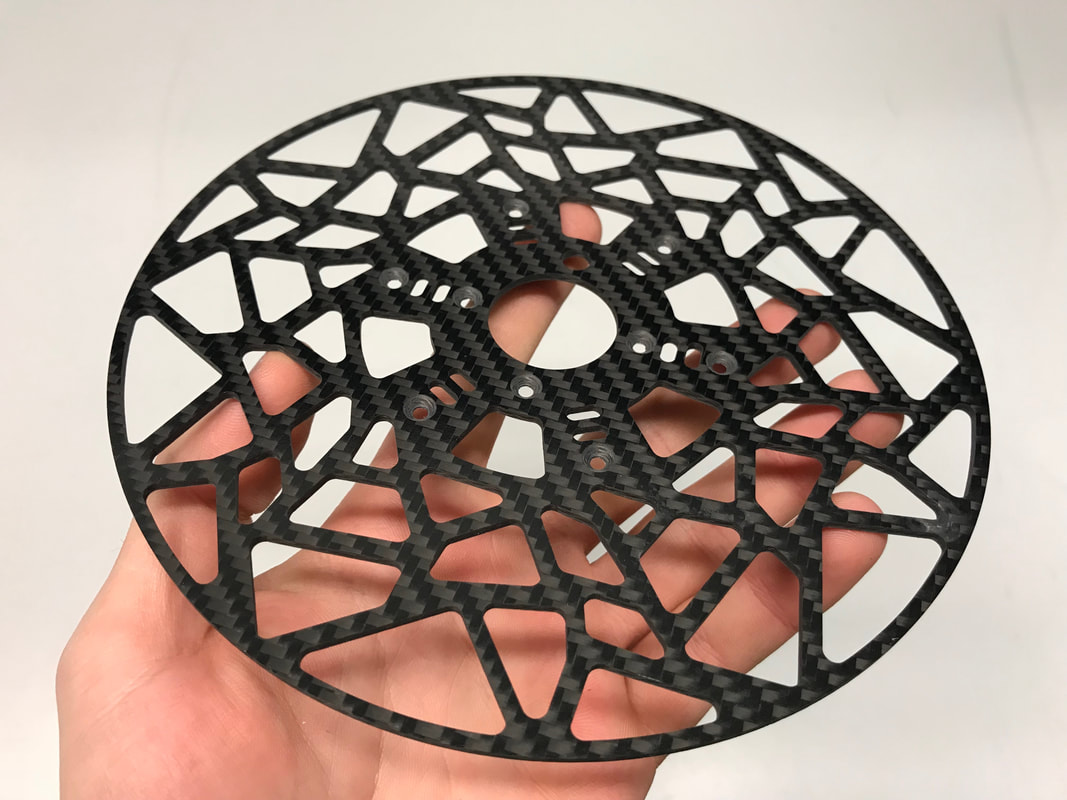
The market's response to Obsidian v1 was that it needed to be bigger, but the weight must remain the same. My analysis indicated that I could reduce the carbon fiber plate thickness to 2mm before deflection under load became a problem. Obsidian v2 ended up being the same weight as v1, while also being 20% larger.
Design: Autodesk Inventor Construction: 2mm carbon, CNC machined aluminum, off the shelf hardware |





Venu Gimbal (2013)
|
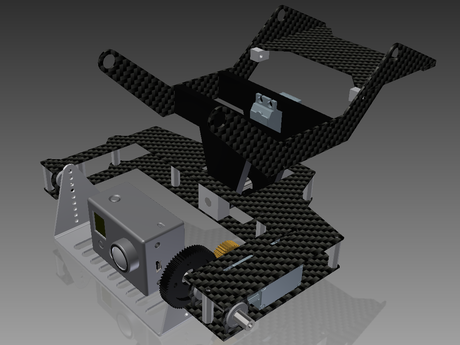
A small 2-axis gimbal designed for a small quadcopter (named the Venu), to fly a GoPro or Micro 4/3 camera. This gimbal was designed to match up with mounting points of an existing gimbal that Hoverfly had poor luck with in the past. The gimbal was a success, and was sold with every Venu system.
Design: Autodesk Inventor Construction: 1.5mm carbon, CNC machined and laser cut aluminum, off the shelf hardware |
CAD Model
|

Gimbal IRL
|
System Builds (2012-2014)


|
Hoverfly funded all of its product endeavors by selling complete drone systems to cinematographers. At the time, Hoverfly flight controllers were the best on the market, and if you wanted a drone, you had to build it yourself.
I was part of a team of interns responsible for assembling the frames, soldering wiring harnesses, making any necessary mechanical modifications per customer request, programming the flight controllers, and test flying the drones before they were packed and shipped. During this time I built around 20-30 drones, most of them octocopters. |
Skyscout/Livesky (2013-2014)
|
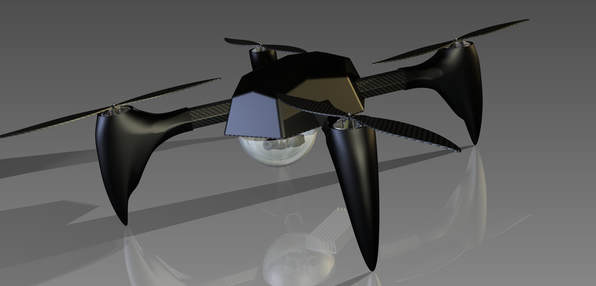
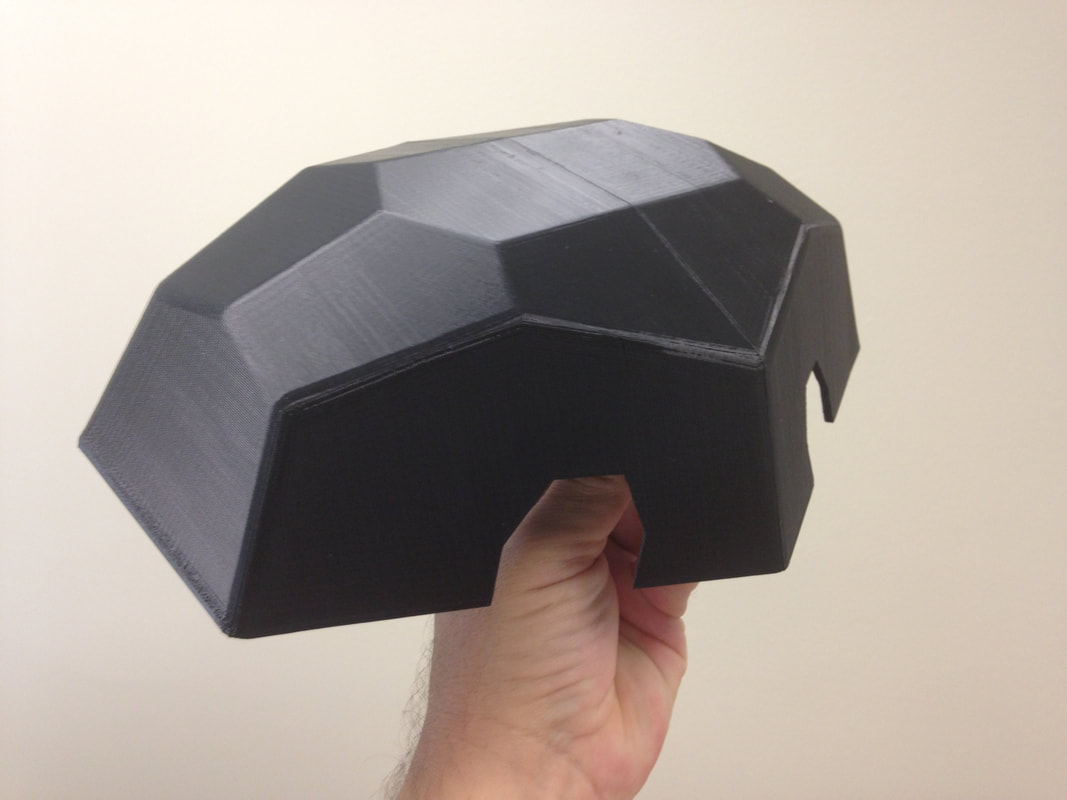
I had the honor of designing the world's first tethered drone. This was going to be the company's future, their main product. The company was low on cash and needed to move fast, so this project went from napkin sketch to CAD model to first prototype in 8 weeks.
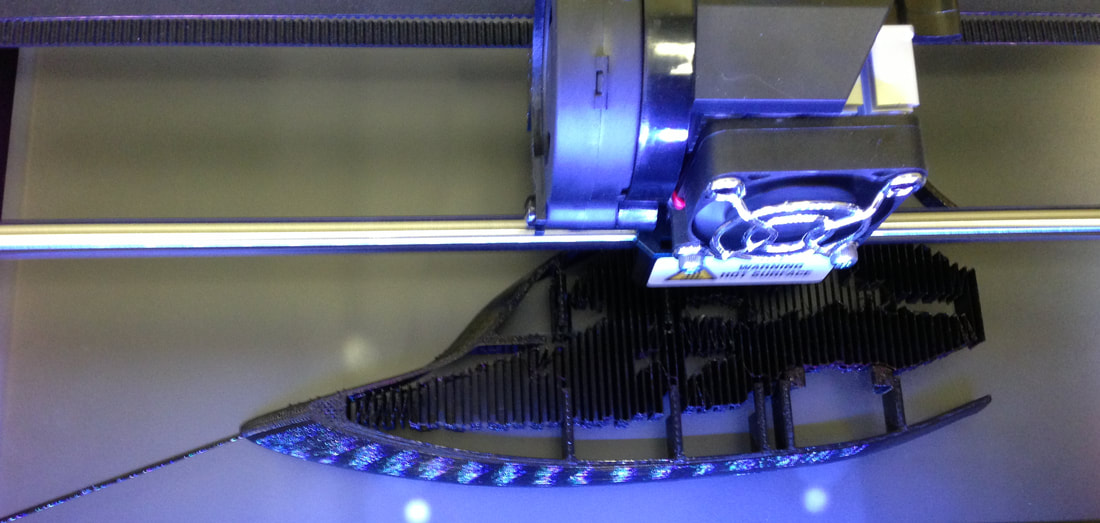
The most challenging part of this design was the landing gear legs, which needed to be organic looking but still blend into the hexagonal shape of the booms. The organic shaped legs also feature molded silicone tips, to cushion rough landings. I created these feet with a 3-piece 3D printed mold. Design: Autodesk Inventor Construction: Carbon plates and hex tubes, vacuum formed ABS plastic, 3D printed landing legs, off the shelf hardware |
CAD Model

Livesky IRL
|



6203 Livesky (2014-2015)

|
The 6203 was the product of everything that was learned during the testing of the Skyscout. I made it larger, increased the propeller diameter, and the plastic landing gear parts became much easier to manufacture and assemble. I utilized SLS 3D printing to create very accurate, high quality plastic parts before investing in injection molds.
This aircraft was sold to several important customers including General Dynamics, FDNY, and certain divisions of the US Army. Design: Autodesk Inventor Construction: Carbon plates and hex tubes, vacuum formed ABS plastic, 3D printed landing legs, off the shelf hardware |
|
|
|






Gravity Gimbal (2013)
|
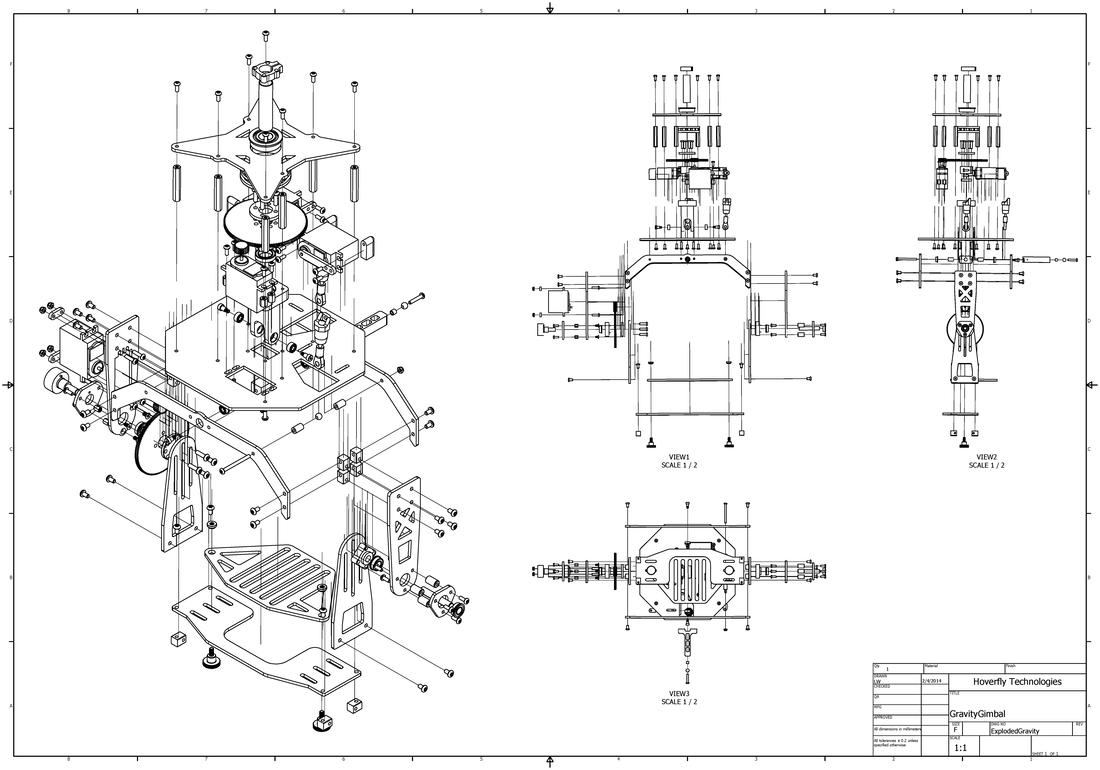
I had an idea for a new camera gimbal design that would take up minimal room relative to the size camera it could handle, and began designing it on my own time. The idea was that all 3 stabilization axes should be as close to the top as possible, since when mounted to an aircraft, that's where the aircraft would pivot.
This gimbal featured a lot of innovations not found in other gimbals, such as the 2-axis camera tray and thrust bearing-supported pan axis. Design: Autodesk Inventor Construction: 2.5mm carbon, machined aluminum, off the shelf hardware |
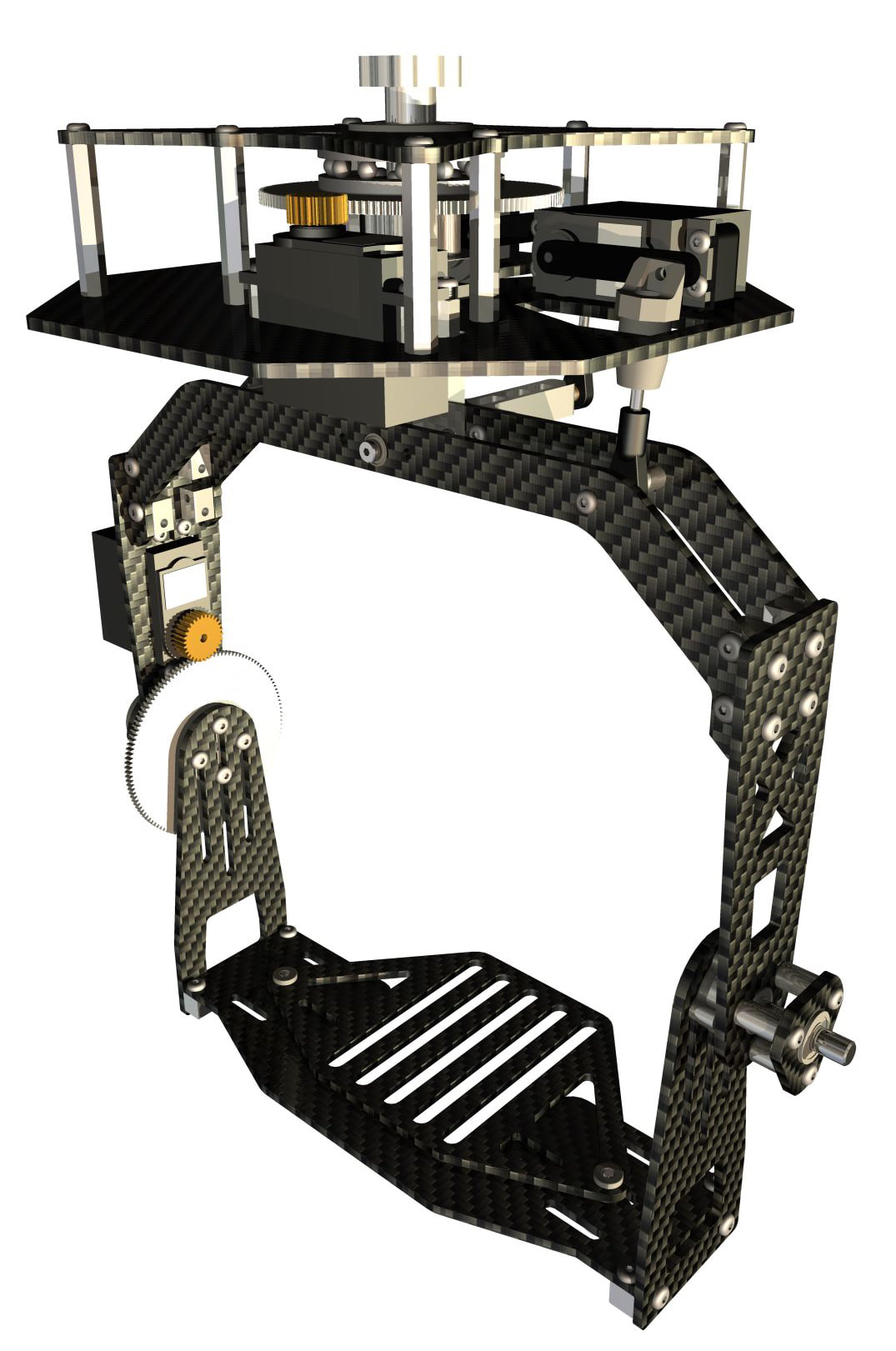
CAD Model
|
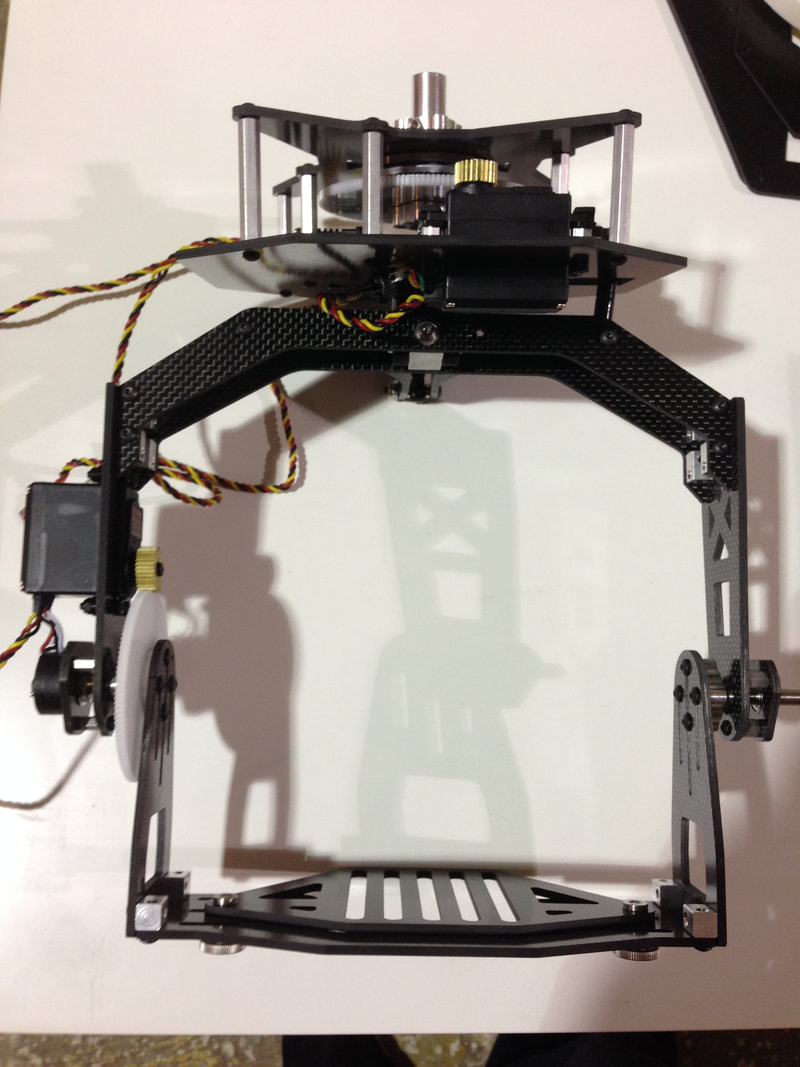
Gimbal IRL
|
|
|
|
Bigsky (2015-2018)
|
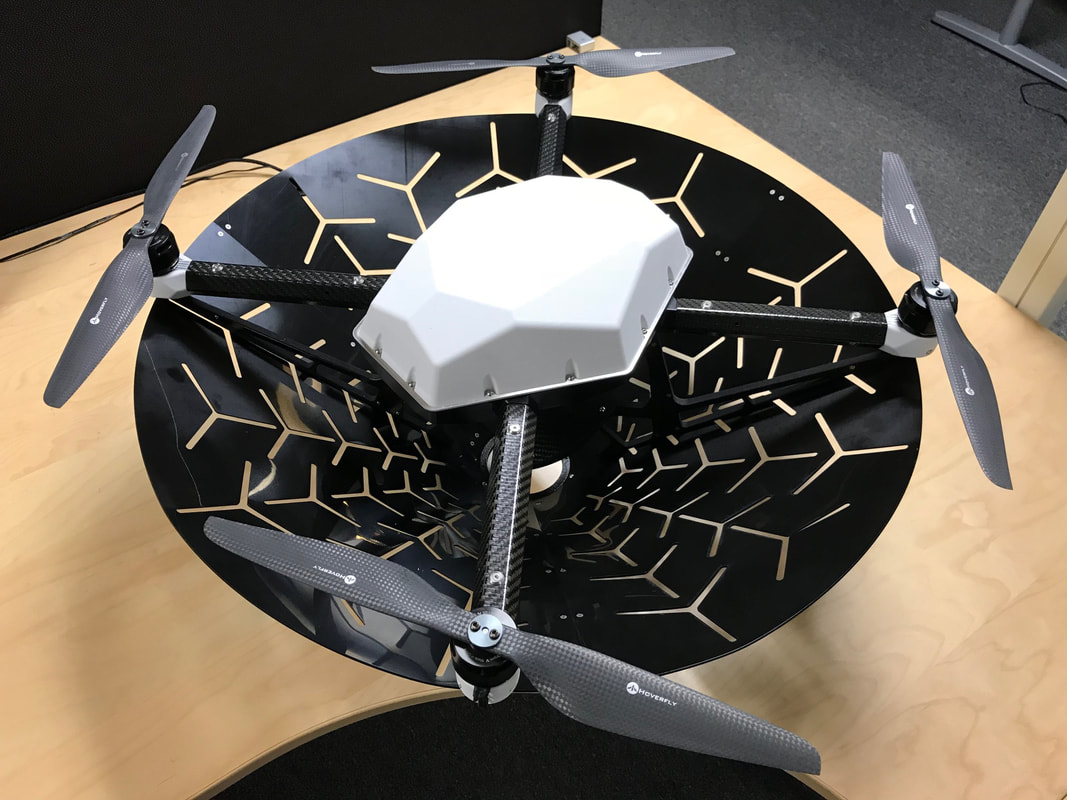
The bigsky started as a high-endurance drone, capable of flying 1 hour on a single charge. It went through several design iterations and eventually became tether-powered, capable of flying (theoretically) forever. Below you can see the original Bigsky, as well as a few pictures of the latest tethered version. I was responsible for this aircraft design as it went through its several iterations.
This aircraft in its latest iteration weighed 20lbs without a payload, and was capable of carrying 15lbs of payload. All power was sent up via a 2mm diameter tether, with communications overlaid on the power. Design: Autodesk Inventor Construction: Carbon plates and rectangular tubes, machined aluminum, vacuum formed ABS plastic, 3D printed parts, CNC machined aluminum, off the shelf hardware |

Me carrying the massive tethered Bigsky.
|

Tethered Bigsky in action.
|

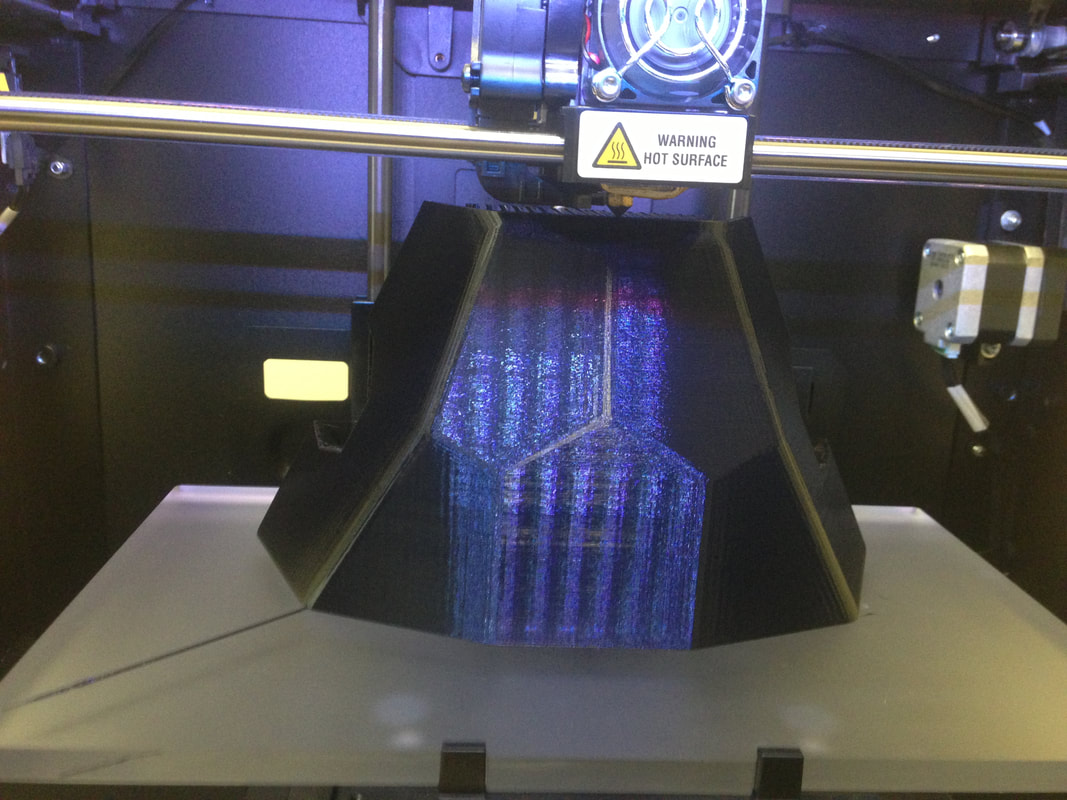
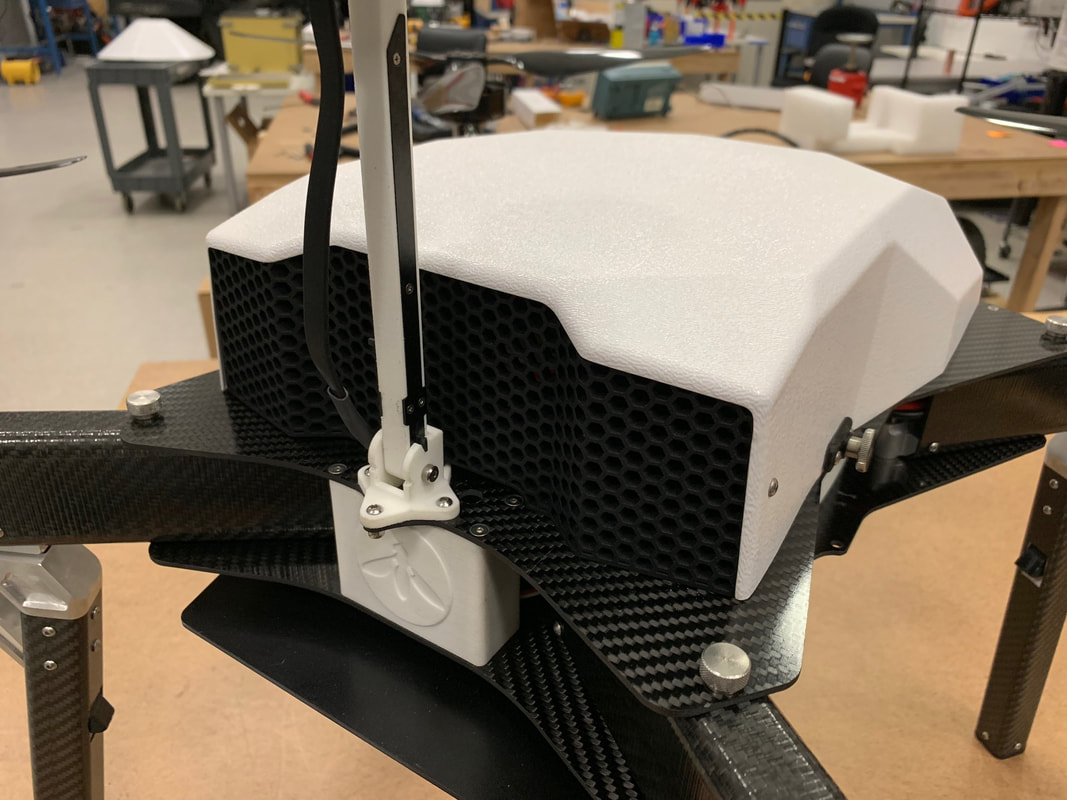
The "low-poly" design inspiration for the canopy came from the Livesky.
|

A hex-mesh grille at the back of the canopy is the exhaust for all the generated heat, much like a mid-engine sports car.
|



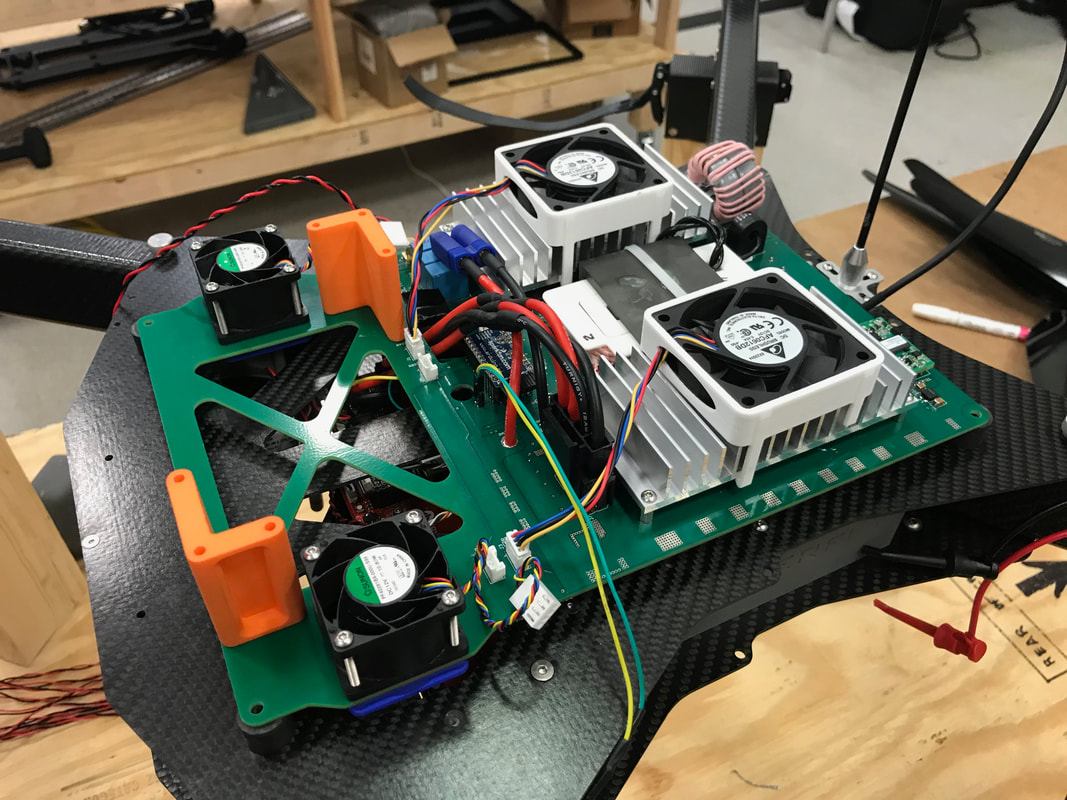
The design of the tethered Bigsky was very challenging. To get an aircraft of this size to fly while powered by such a thin tether, around 1000VDC had to be sent up the tether to the craft, which then had to step that voltage down. Working with the power electronics team to develop a DCDC converter circuit that would fit inside of this aircraft was a valuable learning experience. The power levels this system required were deadly, as were the 29” diameter carbon fiber propellers. This system demanded a whole new level of respect compared to other projects I had worked on previously.
6204 Livesky (2016-2018)
|
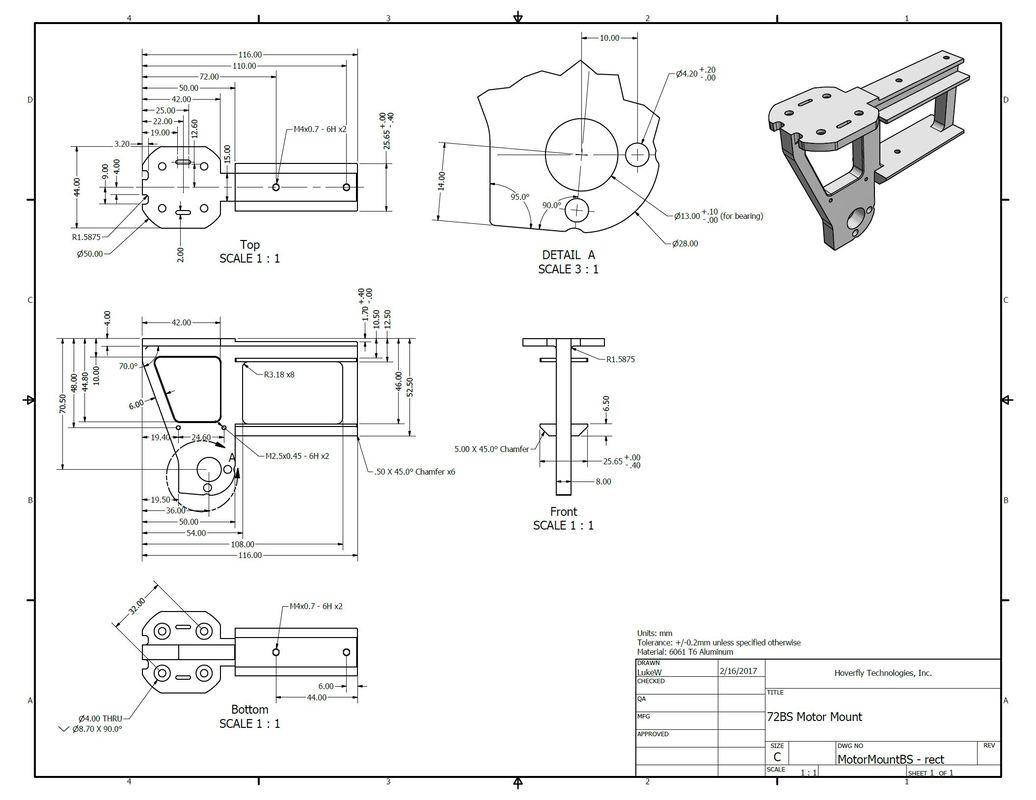
The Livesky needed an update, due to several lessons we learned on the 6203 platform. I designed the new 6204 to mitigate all issues we had learned from in the past, without creating something so radically different that we would run into new problems.
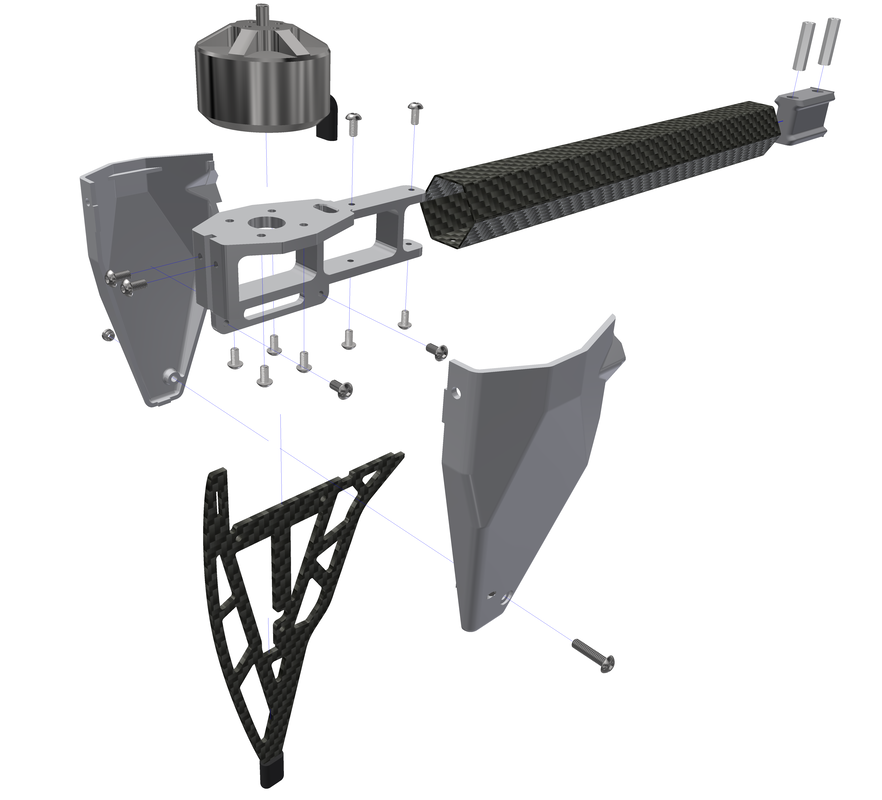
The motors were now fully exposed to aid in cooling, the motor mounts were CNC machined aluminum, and overall the entire craft was much easier to manufacture. A large percentage of my effort went into redesigning the motor mounts/landing legs to improve upon the old design while maintaining the design language of the original. This was important for the company's image. Design: Autodesk Inventor Construction: Carbon plates and hex tubes, vacuum formed ABS plastic, 3D printed parts, CNC machined aluminum, off the shelf hardware |

CAD Model (with EOIR payload)

Livesky IRL (with EO-only payload)
|

The New York Fire Department uses the 6204 Livesky to get a top-down view of any emergency situation.
|

Actual image from a Livesky EOIR gimbal. The aircraft was about a mile away, at 200ft altitude.
|





Tether Management Optimization (2016)
In early 2016, Hoverfly had hired an outside freelancer to design a tether management system for our tethered drone systems. This system was supposed to automatically reel tether in and out as the attached aircraft climbed and descended, while maintaining a constant tension on the tether. In short…the design did not work well, and the tension was anything but constant. I designed a few different unique mechanisms to help smooth out the jerking motion that the system imparted on the aircraft through the tether.
In the end, although these designs helped, a new tension management system was needed.
Design: Autodesk Inventor
Construction: CNC machined delrin and aluminum, 3D printed parts and molded silicone, off the shelf hardware
In the end, although these designs helped, a new tension management system was needed.
Design: Autodesk Inventor
Construction: CNC machined delrin and aluminum, 3D printed parts and molded silicone, off the shelf hardware
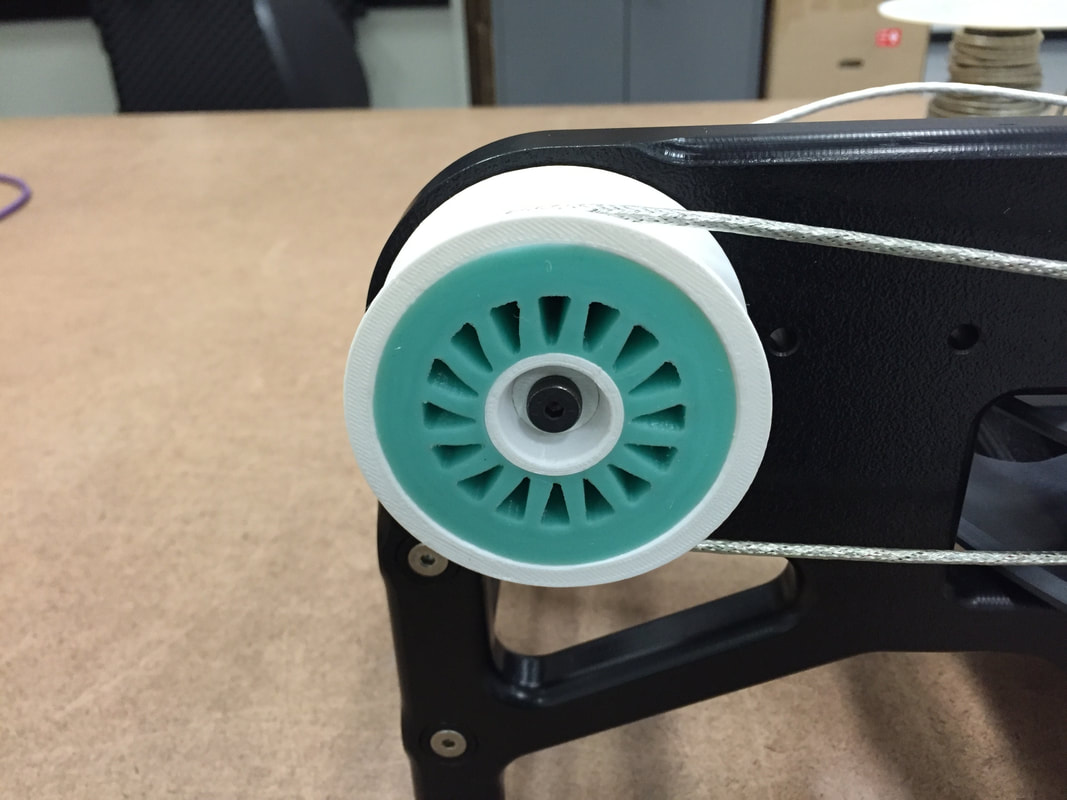
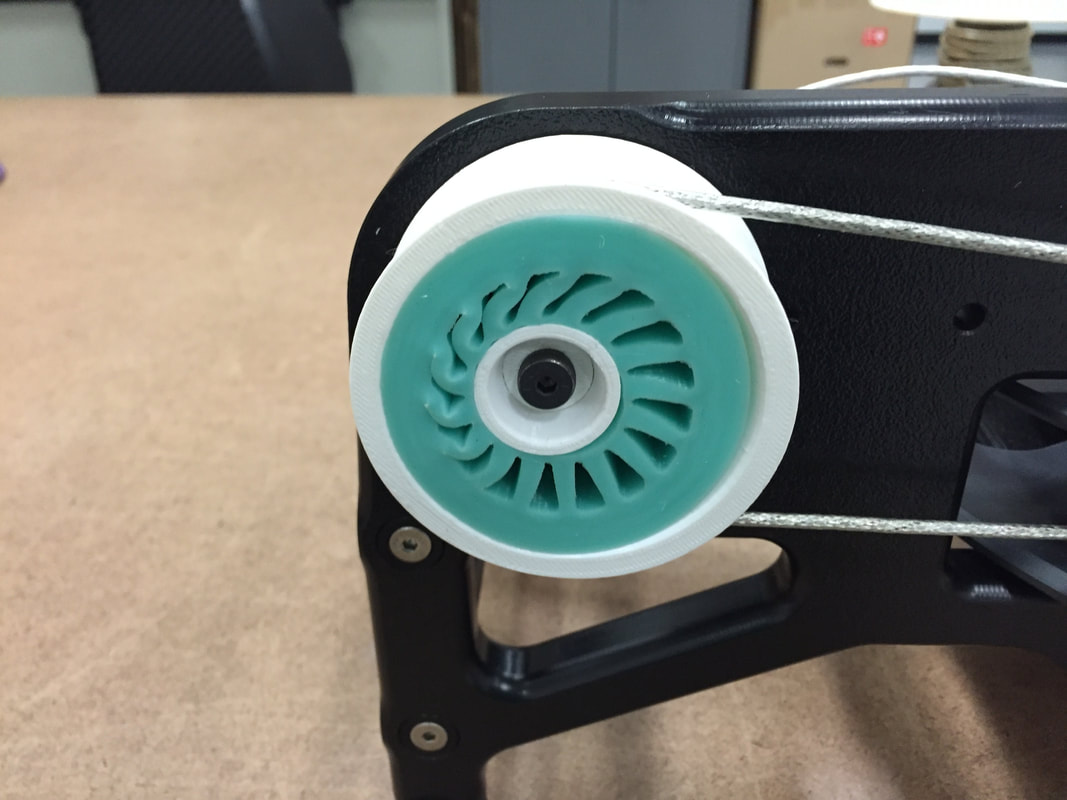
Silicone-core idler pulley would deflect under any shock loading.
|


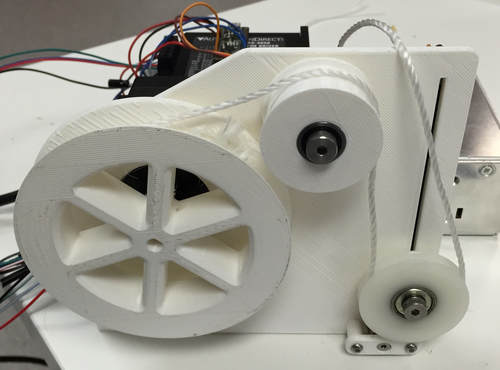
Similar concept to the silicone pulley, the center pulley was mounted on a slider suspended by springs.
|
TK2 (2016-2017)
|
While trying to fix Hoverfly’s existing tether management system, I had an idea for a different design that would hopefully work much better. I built a very crude prototype from some hardware and 3D printed parts. It was an embarrassingly simple design that I put very minimal time into, but the idea was that if this worked at all, it would prove the concept and then an actual design that I took some time on could work extremely well.
After quickly wiring and programming the motor controller, the 3D printed proof-of-concept shown above worked remarkably well! It was exactly what we needed, and was already orders of magnitude better than the design we had been selling at the time. My top priority very quickly became creating the “real” version of this concept, that could hold over 200ft of tether and maintain tension in the same way. I came up with a monolithic design that was enclosed in a single machined block of aluminum, and I worked with a few different machine shops to get parts for a first prototype. Currently, this project has gone through a couple of small iterations and is complete. I have produced all of the necessary manufacturing drawings, and this is a critical component to every tethered system that Hoverfly sells. Design: Autodesk Inventor Construction: 2mm carbon plates, 3D printed parts, CNC machined aluminum, off the shelf hardware |
The very crude 3D printed proof of concept that changed everything.
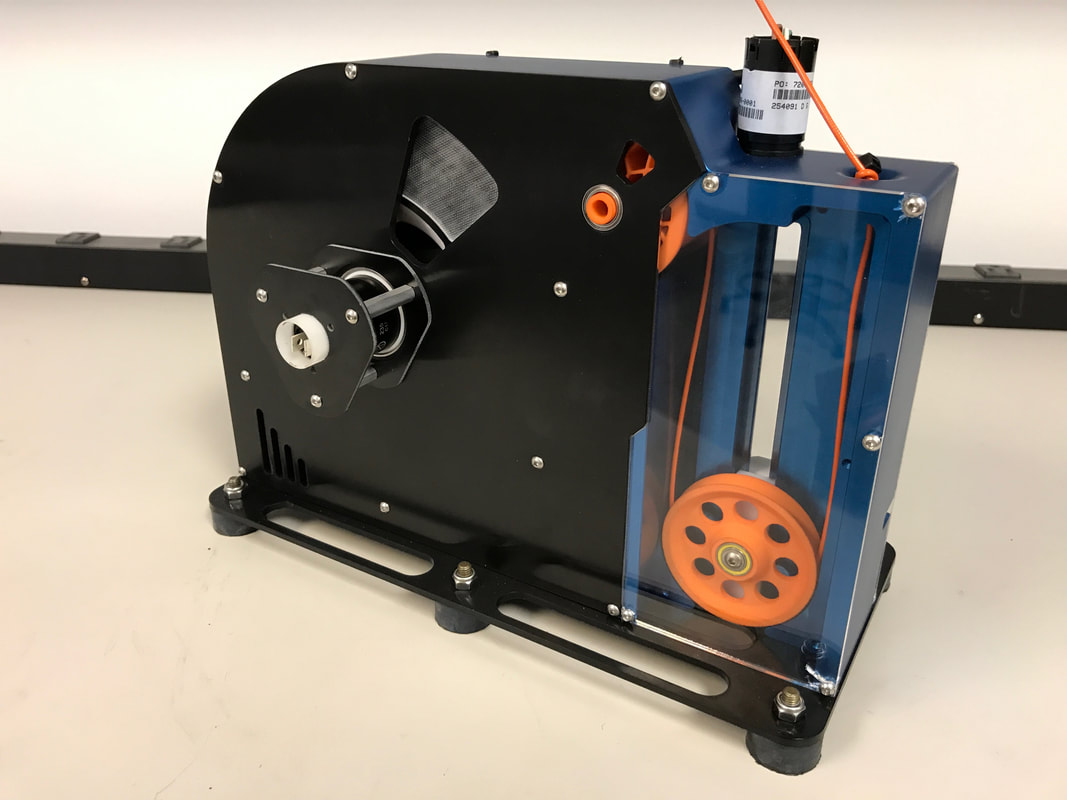
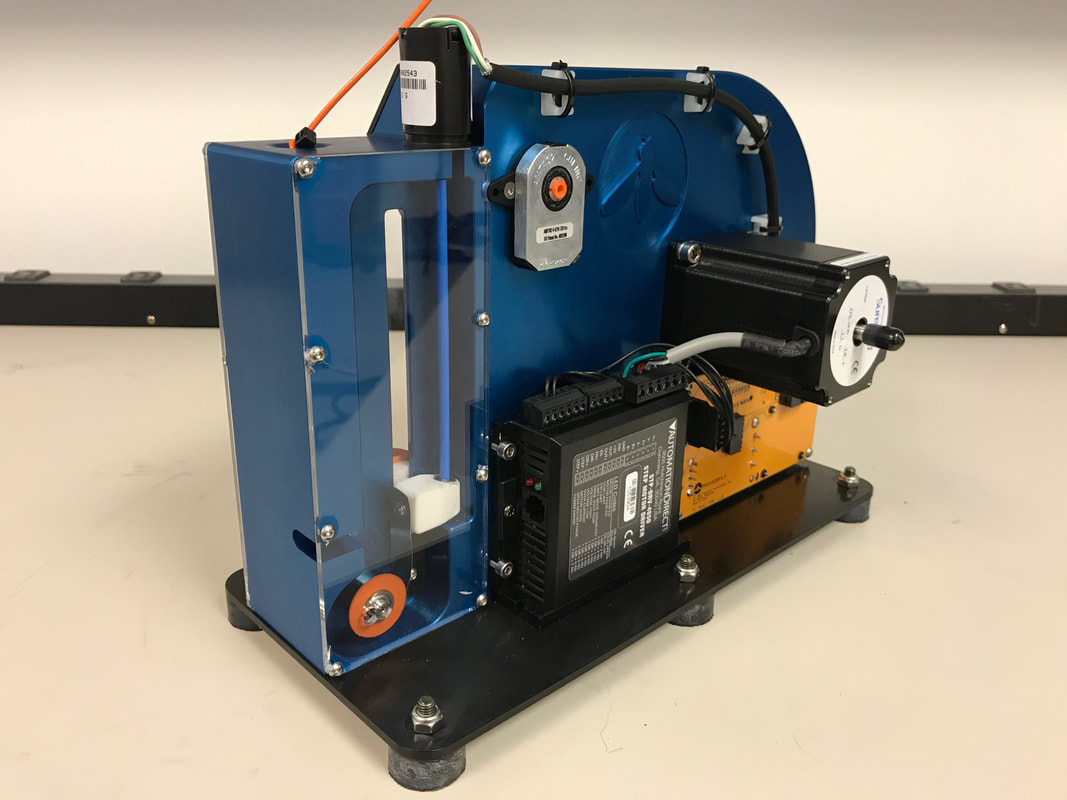
The first prototype of the TK2.
|
After initial testing was complete, we quickly ordered parts for 10 TK2s.
|
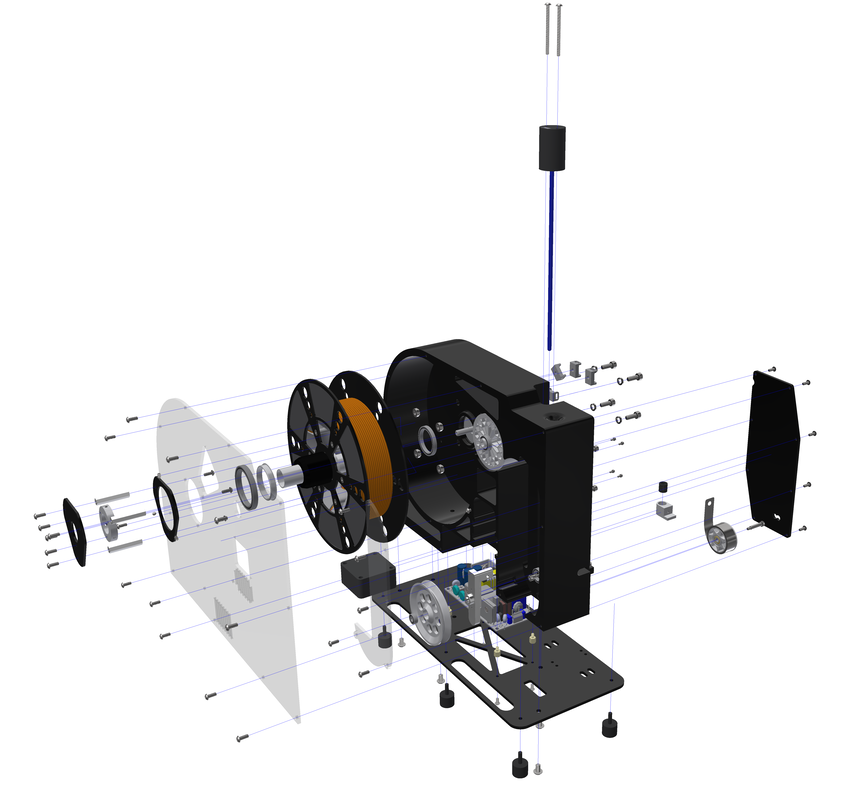
Exploded view of the entire TK2 Assembly.
|


|
|
|
Dual Camera, 3-axis Gimbal (2015)
|
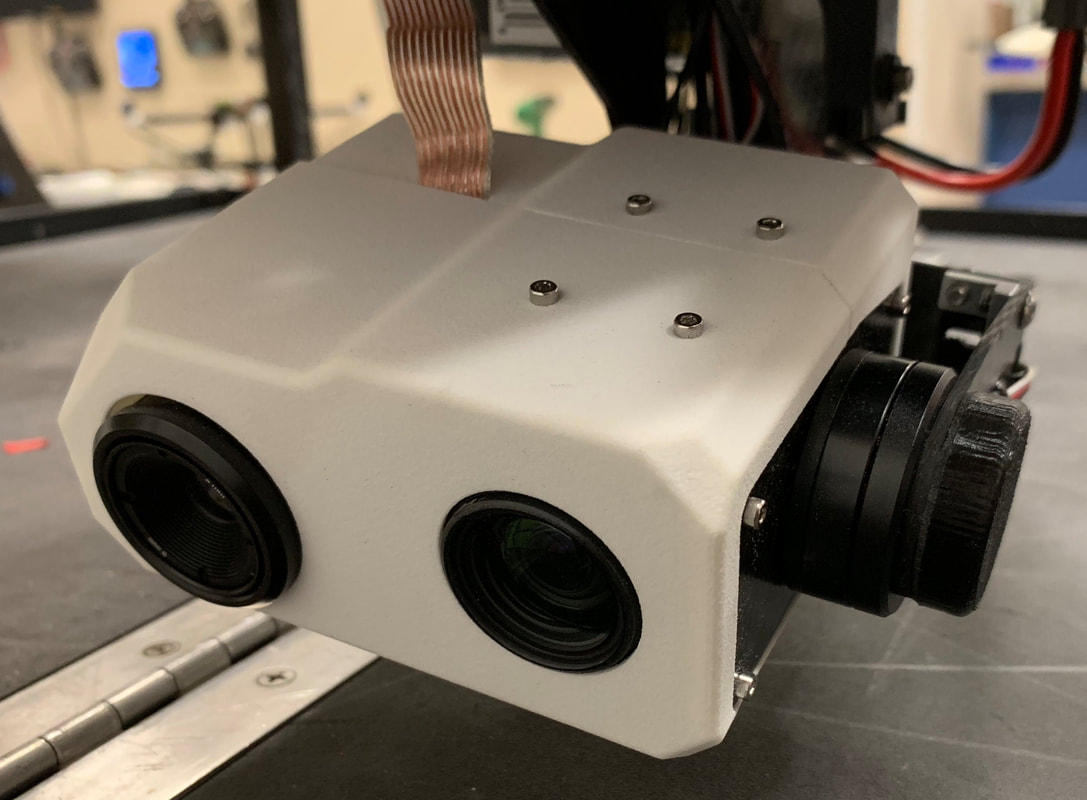
Up until late 2015, Hoverfly had been using off-the-shelf cameras and gimbals. A need arose for a 3-axis camera gimbal with a 10x optical zoom camera as well as an IR camera. Nothing was available on the market, so I designed one.
The camera gimbal to the left uses 3 brushless motors, one on each axis, to stabilize the camera pod for super smooth video, even when zoomed all the way in. This was a good start, and several of these gimbals were sold with Hoverfly systems while I designed the next version. Design: Autodesk Inventor Construction: 2mm carbon, 3D printed enclosure, off the shelf hardware |
PTZ2 (2017-2018)
|
The “PTZ2” gimbal pictured above had a lot of improvements over the old design. It was smaller and lighter, had no visible wires, and was arguably a much more attractive design. I worked with our camera supplier to get a single video processing board that would handle both cameras, which enabled the whole device to be very compact. I was responsible for this entire design, mechanically and electrically. This gimbal was also designed to be IP54 and could be clipped in and out of a “hotshoe” receptacle with spring loaded contacts.
This gimbal is the primary payload for every aircraft that Hoverfly sells. Design: Autodesk Inventor Construction: Carbon plates, 3D printed parts, off the shelf hardware |

PTZ2 CAD rendering.
|

The "cage". The spherical enclosure is purely aesthetic, so this gimbal can be calibrated, tuned, and troubleshot with full access to the cameras and electronics.
|

PTZ2 gimbal mounted to a 6204 Livesky and ready for flight.
|

Condensation after withstanding extreme cold temperature testing.
|

Gimbal assembly line.
|
Livesky Sentry (6205) (2018)
|
The next iteration of the Livesky system was very different from the previous versions. This version needed to land in a small box, so there needed to be a foolproof precision landing system. The Hoverfly team and I came up with the idea of a conical landing platform that the craft would slide into, perfectly centering it every time.
The entire aircraft was designed around the conical landing platform, including the unconventional landing gear that are angled inwards to match up with the angle of the landing cone. Design: Autodesk Inventor Construction: Carbon plates and hex tubes, 3D printed plastics, CNC machined aluminum and plastic, vacuum formed ABS, injection molded silicone, off the shelf hardware |

The PTZ2 gimbal clips into the 6205 just like previous Livesky aircraft.
|

The angled landing gear connect in the middle to the tether attachment point, which is also the mounting point for an ultrasonic rangefinder.
|
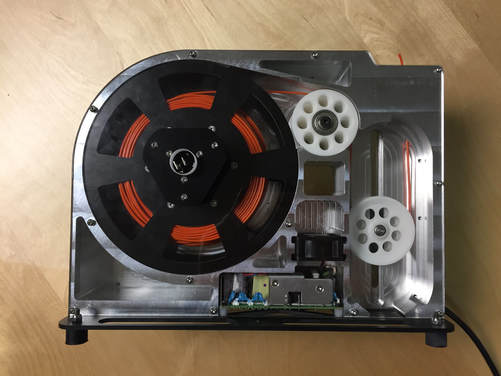
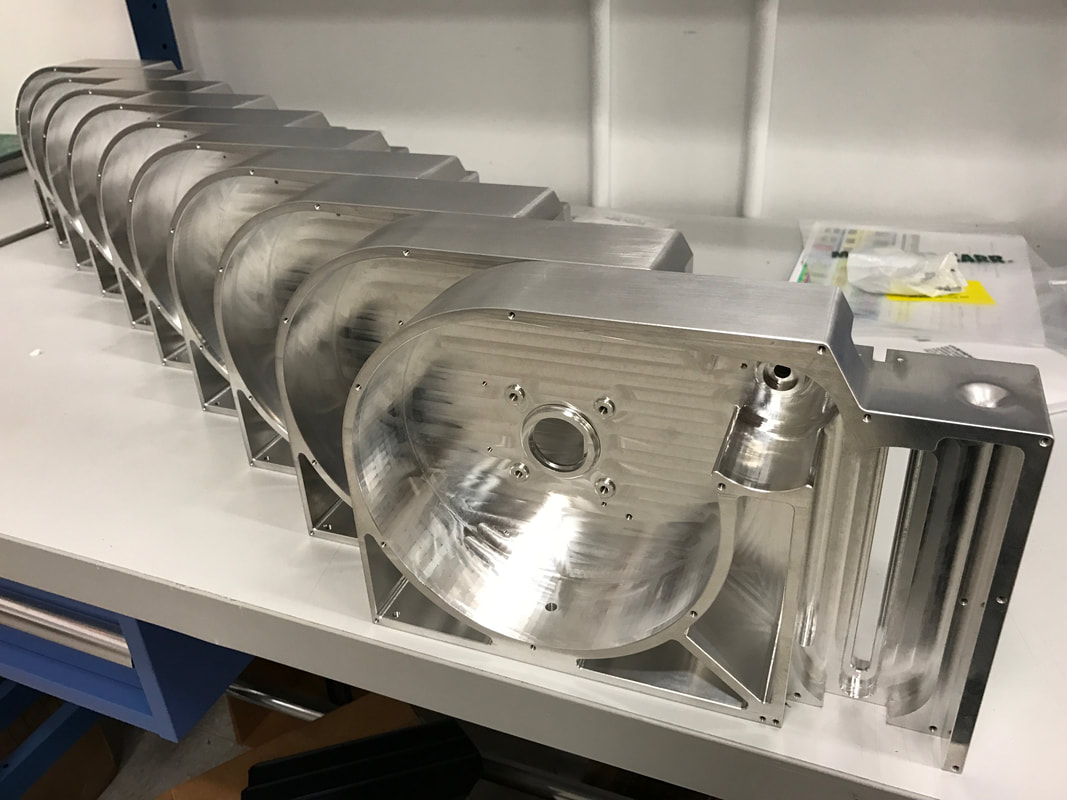
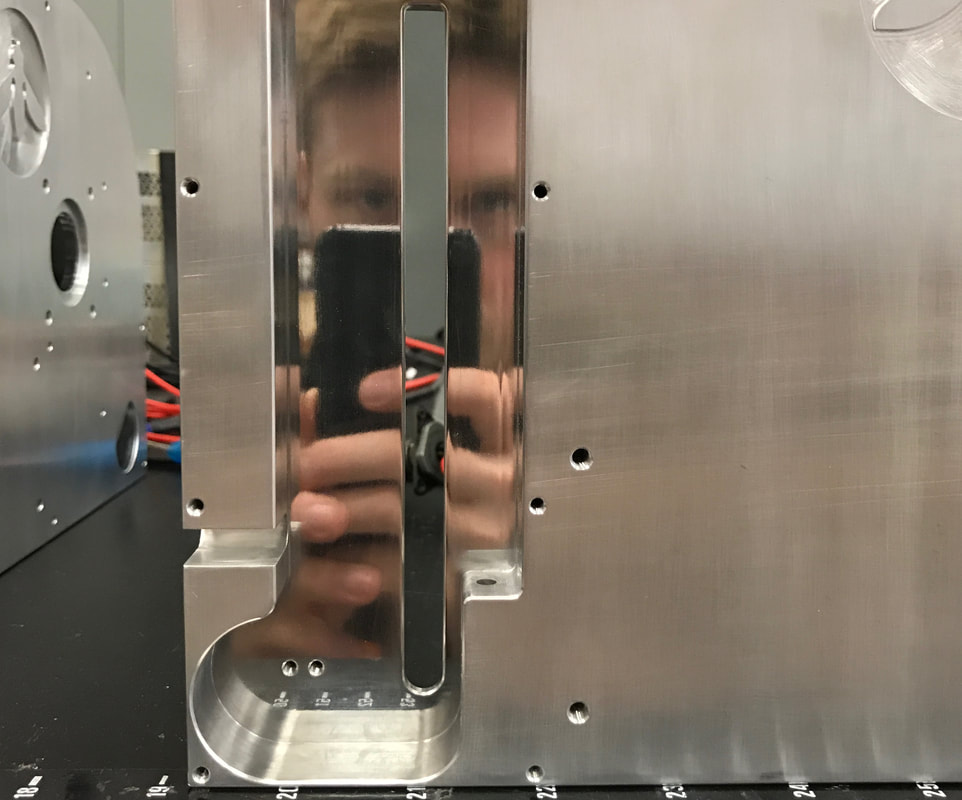
The 6205 was also designed to fly in the rain if needed. This called for a monolithic frame design which, much like the TK2, was machined from a single piece of aluminum. This part replaced what would have been nearly 50 parts on the old Livesky design, and it served as a heatsink for critical components. This made sealing against water incursion much simpler and easier to manufacture. Here is the gorgeous raw machined part, before surface treatments.
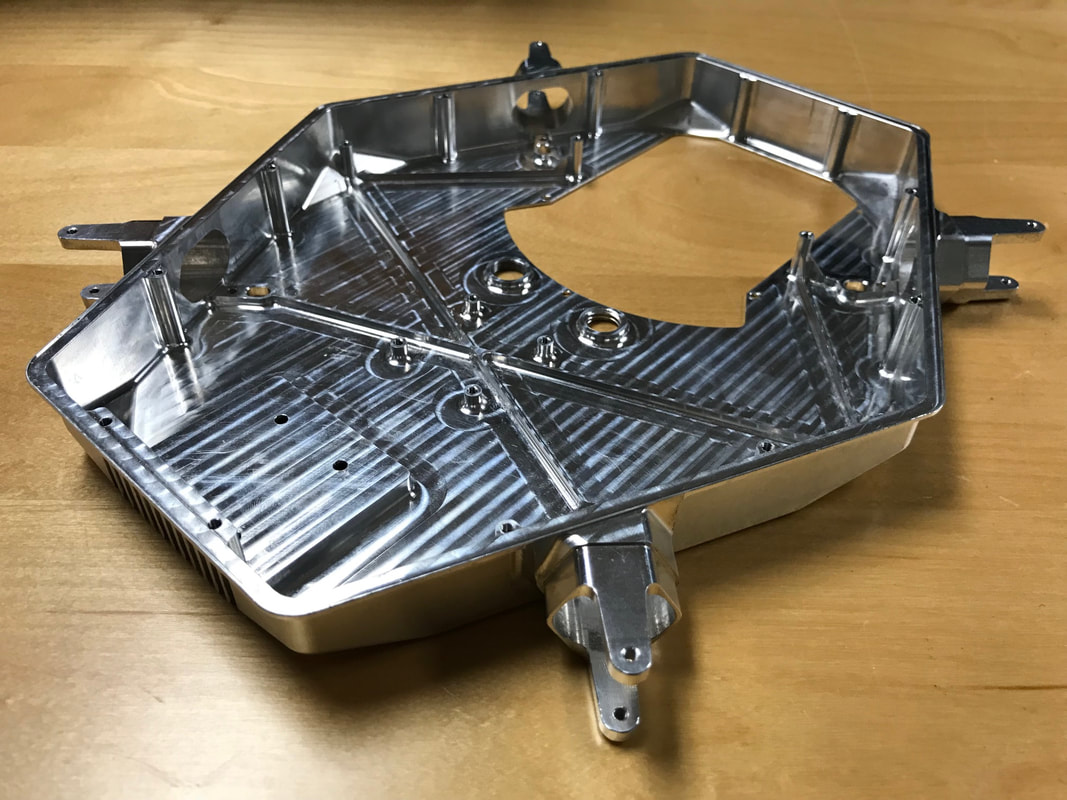
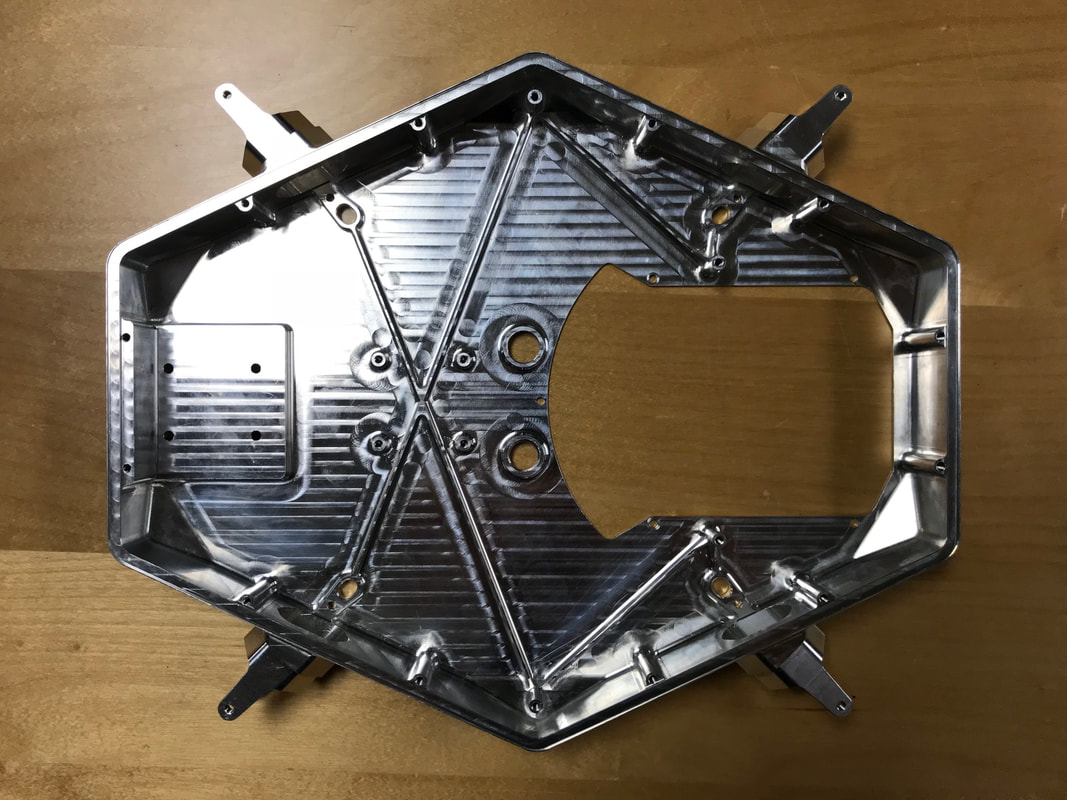

|
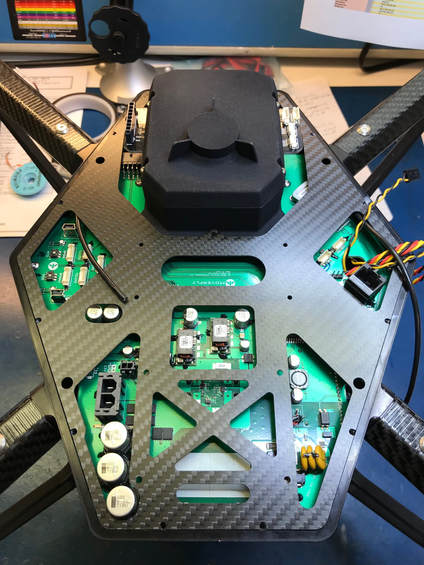
I worked very closely with the electrical engineers on this project and provided them with a PCB outline and keep-out regions. The finished PCB fits very snugly inside the craft, while still providing easy access to connectors and other critical components.
There is one component that generates the majority of the heat on this PCB, and that component is mounted to the heatsink fins machined into the 6205's aluminum frame. Check out the landing cone concept in action below: |
|
|
|

|